Theoretical Background: Classification of Robots
Module 1 Theory: Introduction and Basics — Lecture 2
2.1 Classification by Application
2.1.1 Industrial Robots vs. Service Robots
Industrial Robots operate in structured, controlled environments (factories) and perform repetitive tasks such as welding, painting, assembly, and pick-and-place. They are typically fixed-base manipulators governed by standards ISO 8373 and ISO 10218.
Service Robots operate in unstructured, human-centric environments and perform useful tasks for humans outside of manufacturing. They fall into two categories:
- Professional service robots: Medical, logistics, agriculture, defense
- Personal/domestic service robots: Cleaning, entertainment, assistive
Key Distinctions:
- Environment: Industrial robots require structured settings; service robots must handle unstructured, dynamic environments
- Human Interaction: Industrial robots traditionally operate behind safety cages; service robots work in close proximity to humans
- Task Variability: Industrial robots execute repetitive, pre-programmed trajectories; service robots must adapt to variable tasks
- Programming: Industrial robots are typically pre-programmed; service robots often require autonomous decision-making
- Standards: Industrial robots follow ISO 10218; service robots follow ISO 13482
2.1.2 Collaborative Robots (Cobots)
A hybrid category designed to work alongside humans without safety cages. Cobots use force-limited joints, easy programming through lead-through teaching, and comply with ISO/TS 15066 safety requirements.
ISO/TS 15066 defines four collaborative operation modes:
- Safety-rated monitored stop
- Hand guiding
- Speed and separation monitoring
- Power and force limiting
Examples: Universal Robots UR series, FANUC CR series, ABB YuMi.
2.2 Classification by Mobility
2.2.1 Fixed vs. Mobile Robots
Fixed-Base Robots (Manipulators) are anchored to a surface, work within a defined workspace, and offer high precision and payload capacity. Examples include the KUKA KR series and ABB IRB series.
Mobile Robots can move through their environment, navigate autonomously or via teleoperation, and trade precision for greater flexibility. They are categorized by domain:
- Ground-based: Wheeled, tracked, legged
- Aerial: UAVs, drones
- Aquatic: Underwater vehicles, surface vessels
- Space: Rovers, free-flying robots
2.2.2 Mobile Platform Comparison
- Wheeled: Simple, efficient, fast — but limited to smooth terrain. Used in warehouses and offices.
- Tracked: Good traction on rough terrain — but slow with high mechanical wear. Used in military and agriculture.
- Legged: Versatile across uneven terrain — but mechanically complex, slow, and energy-intensive. Used in search and rescue.
- Aerial: Full 3D mobility with no ground obstacles — but limited payload and battery life. Used for inspection and delivery.
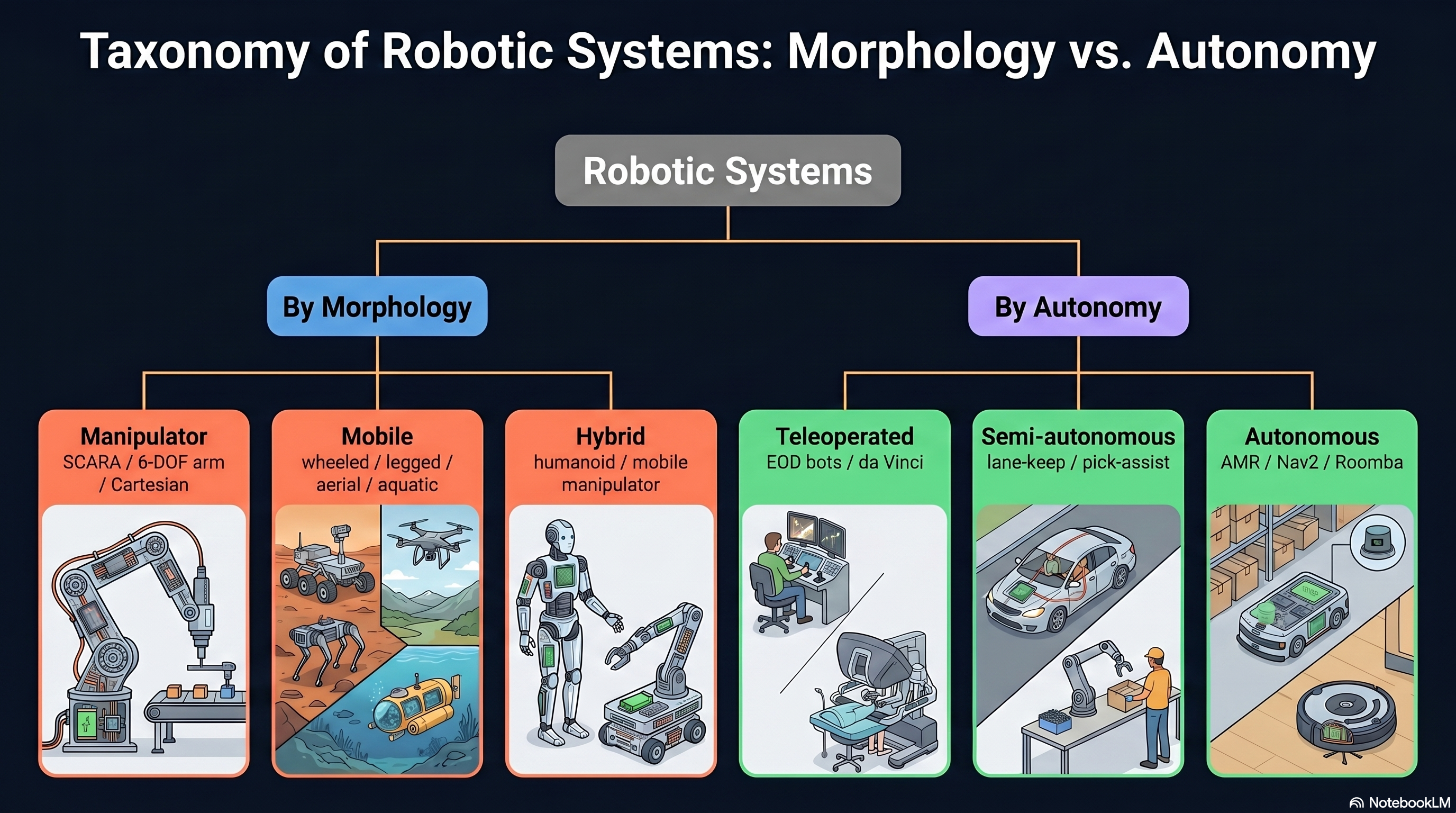
2.3 Classification by Autonomy Level
2.3.1 Autonomy Spectrum
Teleoperated Robots are controlled remotely by a human operator who provides all decision-making. The robot extends human reach into dangerous or inaccessible environments. Examples include surgical robots (da Vinci) and bomb disposal robots.
Semi-Autonomous Robots use shared control between human and robot. The robot handles low-level tasks (obstacle avoidance, path smoothing) while the human provides high-level goals. Examples include assisted driving and supervised manipulation.
Fully Autonomous Robots make independent decisions with no human intervention during operation. They rely on sensors, planning algorithms, and AI. Examples include Mars rovers, autonomous vehicles, and Roomba.
2.3.2 Autonomy Levels (Adapted from SAE J3016)
- Level 0 — No autonomy: Human has full control (e.g., RC car)
- Level 1 — Assistance: Robot assists with one subtask (e.g., cruise control)
- Level 2 — Partial automation: Robot handles multiple subtasks, human monitors (e.g., lane assist)
- Level 3 — Conditional automation: Robot operates independently in defined conditions, human as fallback (e.g., highway autopilot)
- Level 4 — High automation: Robot operates independently in most conditions, minimal human intervention (e.g., warehouse AMR)
- Level 5 — Full automation: No human intervention required in any condition (theoretical general-purpose robot)
2.4 Classification by Locomotion
2.4.1 Wheeled Robots
Differential Drive uses two independently driven wheels. It is simple and effective for indoor navigation.
where and are right and left wheel velocities, and L is the wheel base. Equation (1) gives the linear velocity of the robot center, and equation (2) gives the angular velocity.
Omnidirectional (Mecanum/Omni wheels) allows movement in any direction without rotation. Uses specially designed wheels with angled rollers. Mechanically complex but simplifies motion planning.
Ackermann Steering follows car-like geometry where front wheels turn at different angles. This introduces nonholonomic constraints — the robot cannot move sideways instantaneously. Used in autonomous vehicles.
Skid Steering turns by varying speed on each side, similar to tracked vehicles. Simple control but causes wheel slip and is difficult to model precisely.
2.4.2 Legged Robots
- Bipedal: Humanoid robots (Atlas, ASIMO) — dynamically stable walking requiring active balance control
- Quadrupedal: Spot (Boston Dynamics), ANYmal — support both static and dynamic gaits
- Hexapod: Highly stable with tripod gait — always maintains 3 feet on ground
- Multi-legged: Snake-like, centipede-like configurations for confined spaces
Gait Classification:
- Static gait: Center of gravity always remains within the support polygon
- Dynamic gait: Uses momentum for locomotion — trotting, galloping, running
- Stability margin: Distance from the CoG projection to the nearest edge of the support polygon
2.4.3 Aerial Robots (UAVs)
- Multi-rotor: Quadcopter, hexacopter — vertical takeoff/landing, hovering capability
- Fixed-wing: Airplane-like — efficient long-range flight but no hovering
- Hybrid VTOL: Combines multi-rotor takeoff with fixed-wing cruise efficiency
2.4.4 Aquatic Robots
- AUV (Autonomous Underwater Vehicle): Torpedo-shaped, pre-programmed missions
- ROV (Remotely Operated Vehicle): Tethered, human-controlled for deep-sea operations
- Biomimetic: Fish-like or ray-like locomotion for efficiency and maneuverability
2.5 Classification by Manipulator Geometry
2.5.1 Common Robot Configurations
Cartesian (Gantry) Robot: Uses 3 prismatic joints (PPP). Workspace is a rectangular box. Kinematics are trivial — joint space maps directly to Cartesian space. Applications include CNC machines and 3D printers.
Cylindrical Robot: RPP configuration (Revolute-Prismatic-Prismatic). Workspace is a cylindrical volume. Applications include machine loading and assembly.
Spherical (Polar) Robot: RRP configuration. Workspace is a spherical volume. Applications include gas welding and arc welding.
SCARA Robot: RRP configuration with horizontal revolute joints. Provides selective compliance in the horizontal plane while remaining stiff in the vertical direction. Ideal for assembly and pick-and-place tasks.
Articulated (Anthropomorphic) Robot: All revolute joints, typically 6-DOF (RRR-RRR). Offers the largest and most complex workspace. Most versatile configuration. Applications include welding, painting, and material handling.
2.5.2 Degrees of Freedom (DOF)
The number of independent parameters that define a robot’s configuration:
For a spatial task, 3 DOF specify position (x, y, z) and 3 DOF specify orientation (roll, pitch, yaw), requiring a minimum of 6 DOF for a full spatial task.
Grubler’s Formula for computing the DOF of a mechanism:
where lambda = 6 for spatial mechanisms (3 for planar), n = number of links including ground, and = DOF of joint i.
Key Assumption: Grubler’s formula assumes ideal rigid links and joints with no redundant constraints. In practice, manufacturing tolerances and flexible links can cause the actual DOF to differ from the computed value.
2.6 Integration: Theory to Practice
The classification framework directly guides system design decisions in real robotics projects:
- Application determines mobility: A warehouse pick-and-place task calls for a fixed-base articulated manipulator (high precision, known environment). A last-mile delivery task requires a mobile wheeled platform (unstructured environment, long range).
- Autonomy level determines software complexity: A teleoperated bomb disposal robot needs a reliable communication link and intuitive operator interface. A fully autonomous warehouse AMR needs SLAM, path planning, fleet coordination, and failure recovery — each adding layers to the software architecture.
- Locomotion choice determines the kinematic model: Differential drive gives a simple two-parameter model (equations 1-2). Ackermann steering introduces nonholonomic constraints that require specialized path planners. Legged robots need gait planning on top of individual joint trajectory planning.
- Manipulator geometry determines workspace and singularities: A SCARA robot’s planar compliance makes it ideal for insertion tasks. An articulated 6-DOF arm can reach any pose in its workspace but has singular configurations where it loses a degree of freedom.
2.7 Theoretical Design Choices
Why differential drive dominates indoor mobile robotics? Differential drive provides the simplest kinematic model with full planar mobility (can rotate in place). Omnidirectional wheels offer more freedom but add mechanical complexity and reduce payload capacity. For most indoor navigation tasks, the ability to rotate in place is sufficient.
Why 6-DOF is the standard for industrial manipulators? A rigid body in 3D space has 6 degrees of freedom (3 translation + 3 rotation). Fewer DOF restricts the reachable poses; more DOF introduces kinematic redundancy. The 6-DOF articulated arm represents the minimum configuration for arbitrary spatial manipulation, which is why it became the industry standard after the Stanford Arm.
Why autonomy level should match the task criticality? Higher autonomy reduces operator burden but increases the chance of unrecoverable autonomous errors. Surgical robots deliberately remain at Level 0-1 (teleoperation with tremor filtering) because the cost of autonomous error is too high. Warehouse AMRs operate at Level 4 because the environment is semi-structured and errors are recoverable.
Why legged robots remain niche despite decades of research? The energy cost of legged locomotion is 10-100x higher than wheeled locomotion on flat terrain. Legged robots only provide an advantage on terrain that wheels cannot traverse. The control complexity of dynamic balance further limits deployment. This is why wheeled platforms dominate commercial applications while legged robots remain primarily in research and specialized field operations.