Theoretical Background: History and Evolution of Robotics
Module 1 Theory: Introduction and Basics — Lecture 1
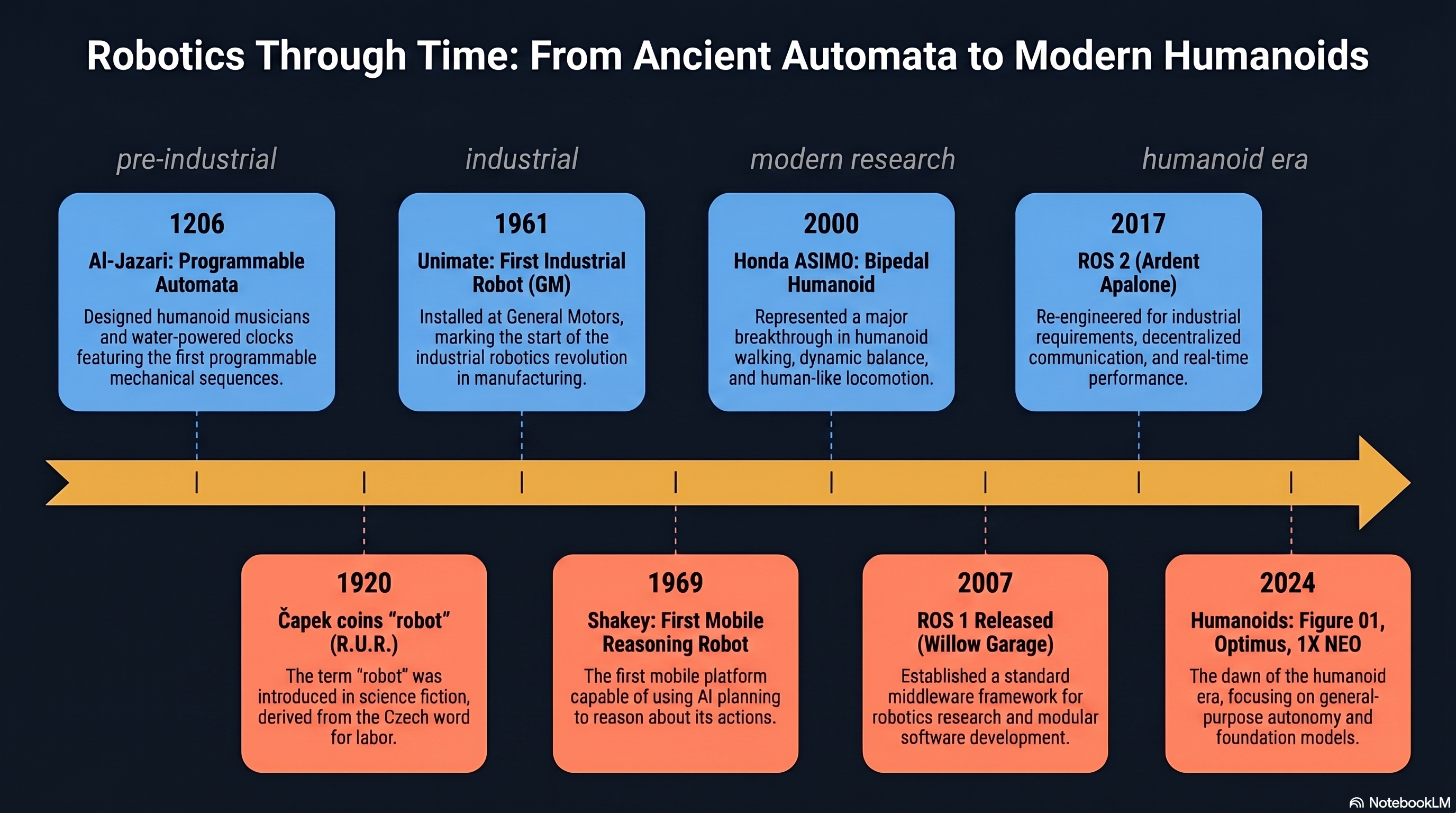
1.1 Timeline of Robotics Development
1.1.1 Ancient and Early Automata (1000 BCE - 1900 CE)
The concept of artificial beings dates back to ancient civilizations. These early efforts established the foundational idea that machines could replicate human motion and perform useful tasks autonomously.
- Archytas of Tarentum (400 BCE) reportedly built a mechanical bird powered by steam, considered one of the first documented autonomous machines
- Al-Jazari (1206 CE) designed programmable automata including humanoid musicians and water-powered clocks with automated figures
- Leonardo da Vinci (1495) designed a mechanical knight capable of sitting, raising its visor, and moving its arms — an early humanoid robot concept
- Jacques de Vaucanson (1738) created the "Digesting Duck" and a mechanical flute player, demonstrating sophisticated mechanical automation
- Nikola Tesla (1898) demonstrated a radio-controlled boat, one of the first remotely operated machines
1.1.2 The Birth of Modern Robotics (1920 - 1960)
- 1920: Karel Capek introduced the word "robot" (from Czech robota, meaning forced labor) in his play R.U.R.
- 1942: Isaac Asimov published the Three Laws of Robotics — foundational ethical framework still referenced in modern HRI research
- 1948: William Grey Walter built Elmer and Elsie — autonomous tortoise robots demonstrating complex behavior from simple circuits
- 1954: George Devol filed the patent for Unimate, the first programmable robot
- 1956: Devol and Joseph Engelberger founded the world’s first robot company
Key Insight: Walter’s tortoises are historically significant because they demonstrated that complex emergent behavior could arise from simple reactive control — a principle that later influenced subsumption architecture and behavior-based robotics.
1.1.3 Industrial Robotics Revolution (1960s - 1980s)
- 1961: Unimate installed at General Motors for die-casting and spot welding — the first industrial robot in production
- 1969: Victor Scheinman developed the Stanford Arm, a 6-DOF electrically powered manipulator that became a standard for robotic research
- 1973: KUKA developed the FAMULUS, the first industrial robot with six electromechanically driven axes
- 1978: PUMA (Programmable Universal Machine for Assembly) developed by Unimation, becoming the workhorse of manufacturing
- 1979: SCARA (Selective Compliance Assembly Robot Arm) developed in Japan for high-speed assembly tasks
Defining Characteristics of This Era:
- Fixed base, repetitive tasks
- High precision and repeatability
- Structured environments with safety cages
- Pre-programmed trajectories with no sensor feedback
1.1.4 Mobile Robotics Revolution (1980s - 2000s)
- 1966-1972: Shakey the Robot (SRI International) — first mobile robot to reason about its own actions using AI planning
- 1986: Honda began development of humanoid robots, leading to ASIMO (2000)
- 1997: NASA’s Sojourner rover successfully explored Mars — the first mobile robot on another planet
- 1997: RoboCup initiative launched — using soccer as a benchmark for mobile robot research
- 2002: iRobot launched Roomba — bringing autonomous mobile robots into homes
Key Shift: The transition from industrial to mobile robotics required solving fundamentally different problems — sensor-based navigation, autonomous decision-making, operation in unstructured environments, and real-time obstacle avoidance.
1.1.5 Modern Collaborative and Autonomous Systems (2000s - Present)
- 2004: DARPA Grand Challenge accelerated autonomous vehicle research
- 2008: Universal Robots introduced the first commercial collaborative robot (cobot)
- 2012: Boston Dynamics demonstrated BigDog and later Spot — advanced dynamic locomotion
- 2013: Amazon acquired Kiva Systems for warehouse automation (now Amazon Robotics)
- 2015: ROS 2 development began, addressing real-time and industrial requirements
- 2020s: Growth in autonomous delivery robots, surgical robots, and AI-powered manipulation
1.2 Key Innovations and Milestones
Each decade introduced a paradigm shift in what robots could do and where they could operate:
- 1960s — Industrial manipulators: Automated manufacturing with fixed, repetitive tasks
- 1970s — Computer-controlled arms: Enabled flexible automation through programmable trajectories
- 1980s — Sensor integration: Introduced adaptive behavior and closed-loop control
- 1990s — Mobile platforms: Expanded robotics into exploration and service domains
- 2000s — Humanoids and cobots: Enabled human-robot collaboration in shared workspaces
- 2010s — Deep learning + robotics: Brought intelligent perception and manipulation
- 2020s — Foundation models + ROS 2: Moving toward general-purpose autonomy
1.3 Current State of the Field
1.3.1 Major Application Domains
Manufacturing: Collaborative robots working alongside humans, flexible manufacturing cells, and quality inspection using machine vision.
Healthcare: Surgical robots (da Vinci system — over 7 million procedures performed), rehabilitation robotics, and telepresence robots for remote medical consultation.
Logistics and Warehousing: Autonomous mobile robots (AMRs) for material handling, last-mile delivery robots, and automated guided vehicles (AGVs).
Agriculture: Autonomous harvesting robots, precision spraying and weeding, crop monitoring drones.
Exploration: Mars rovers (Curiosity, Perseverance), deep-sea exploration robots, search and rescue robots.
1.3.2 Enabling Technologies
- Sensors: LiDAR, depth cameras (Intel RealSense), IMUs, force/torque sensors
- Computing: GPU-accelerated perception, edge computing, FPGA-based control
- Software: ROS/ROS 2 ecosystem, simulation tools (Gazebo, Isaac Sim)
- AI/ML: Deep reinforcement learning, computer vision, natural language processing
- Communication: 5G for low-latency teleoperation, cloud robotics
1.4 Future Trends and Challenges
1.4.1 Emerging Trends
- Soft robotics: Compliant actuators and structures for safe interaction
- Swarm robotics: Coordination of large numbers of simple robots
- Bio-inspired robots: Mimicking biological systems for locomotion and manipulation
- Human-robot interaction (HRI): Natural language, gesture, and intent recognition
- Digital twins: Real-time simulation paired with physical robots
1.4.2 Grand Challenges
- Generalization: Moving from task-specific to general-purpose robots
- Safety: Ensuring safe operation in unpredictable environments
- Energy: Improving battery life and energy efficiency
- Ethics: Addressing job displacement, privacy, and autonomous decision-making
- Interoperability: Standardizing communication and integration (ROS 2 as middleware)
1.5 Integration: Theory to Practice
The historical progression of robotics directly informs how modern systems are designed and implemented:
- From Unimate to ROS 2: Early industrial robots used proprietary controllers with hardcoded trajectories. Modern systems use standardized middleware (ROS 2) that separates control logic from hardware, enabling code reuse across platforms.
- From Shakey to SLAM: Shakey’s symbolic AI planner evolved into probabilistic methods. Today’s mobile robots use EKF-SLAM and particle filters — direct descendants of the sensor-based navigation pioneered in the 1970s-80s.
- From safety cages to cobots: The shift from isolated industrial cells to collaborative workspaces required force-limited joints and real-time collision detection — concepts rooted in impedance control theory.
- From teleoperation to autonomy: The autonomy spectrum (teleoperated, semi-autonomous, fully autonomous) maps directly to the sense-plan-act loop complexity required in the software architecture.
1.6 Theoretical Design Choices
Why ROS 2 over proprietary frameworks? ROS 2 provides a publish-subscribe middleware with DDS (Data Distribution Service) that handles real-time communication, quality-of-service policies, and multi-robot coordination. Proprietary systems lock you into vendor-specific hardware; ROS 2’s abstraction layer allows the same navigation stack to run on a TurtleBot, a warehouse AMR, or a custom platform.
Why probabilistic methods dominate modern robotics? Real sensors are noisy and environments are uncertain. Deterministic approaches (like Shakey’s symbolic planner) fail in unstructured settings. Bayesian estimation provides a principled framework for reasoning under uncertainty — this is why EKF, particle filters, and probabilistic SLAM are the standard.
Why 6-DOF for general manipulation? A task in 3D space requires specifying position (3 DOF) and orientation (3 DOF). The Stanford Arm’s 6-DOF design established this as the minimum for arbitrary spatial tasks. Redundant manipulators (7+ DOF) add flexibility for obstacle avoidance but increase computational complexity.
Why collaborative robots use force limiting rather than speed limiting alone? Impact force depends on both velocity and effective mass. ISO/TS 15066 specifies biomechanical limits on transient and quasi-static contact forces. Force-limited joints with compliant control provide safety across the full range of operating conditions, not just at reduced speeds.